
1. КОМАНДА "Keenetic lite lll"
 |
 |
 |
 |
| Хисматуллин Радмир | Богданов Азат | Антонов Илья | Саиткулов Данил |
|
«Keenetic Lite III» - это команда энтузиастов, лидеров изменений из МАОУ «БЛИ №3» г. Стерлитамак Республики Башкортостан (9класс)
Наша команда профилируется в следующих направлениях: Электронная инженерия: Умный город, Machine Learning & Data Science и IoT. Активно работаем над своими soft & hard skills, имеем огромный опыт проектных работ в команде. Наши проекты: • Сетевая инфраструктура Умного города на основе MQTT и Node Red, • Многофункциональное интернет-устройство, • Конвейер-сортировщик на основе TensorFlow. Являемся финалистами два года подряд Олимпиады Кружкового движения НТИ по профилям: Умный город, Научно-инженерная коммуникация и Интернет вещей. Участники заключительного этапа Всероссийской робототехнической олимпиады 2019 (WRO, сезон «Умные города»). Каждый член команды является призером различных этапов ВОШ и других предметных олимпиад по информатике, физике, математике и астрономии. Мы верим, что современные технологии и наша команда помогут человечеству менять наш мир к лучшему и прекрасному. Мы из будущего 2035!
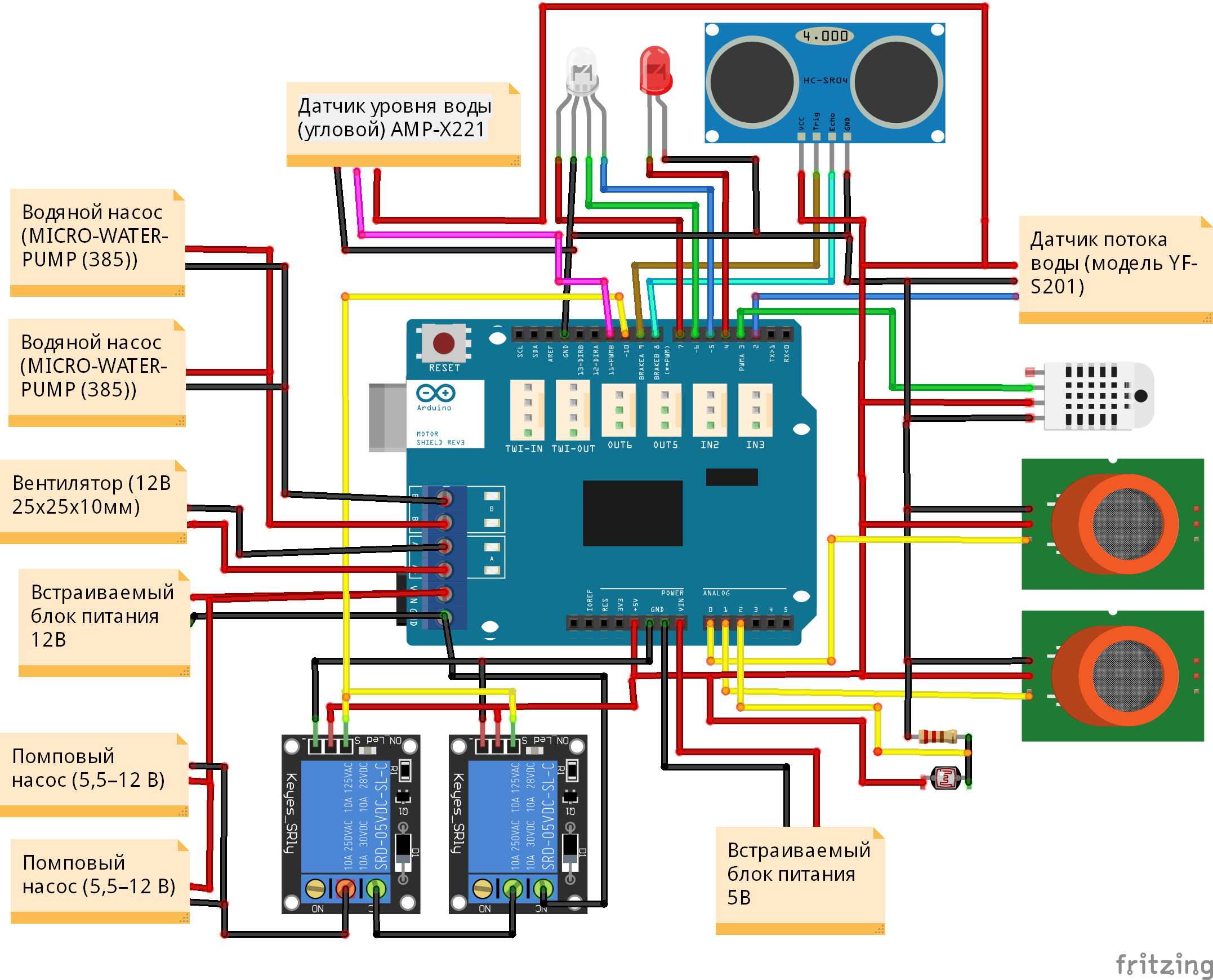
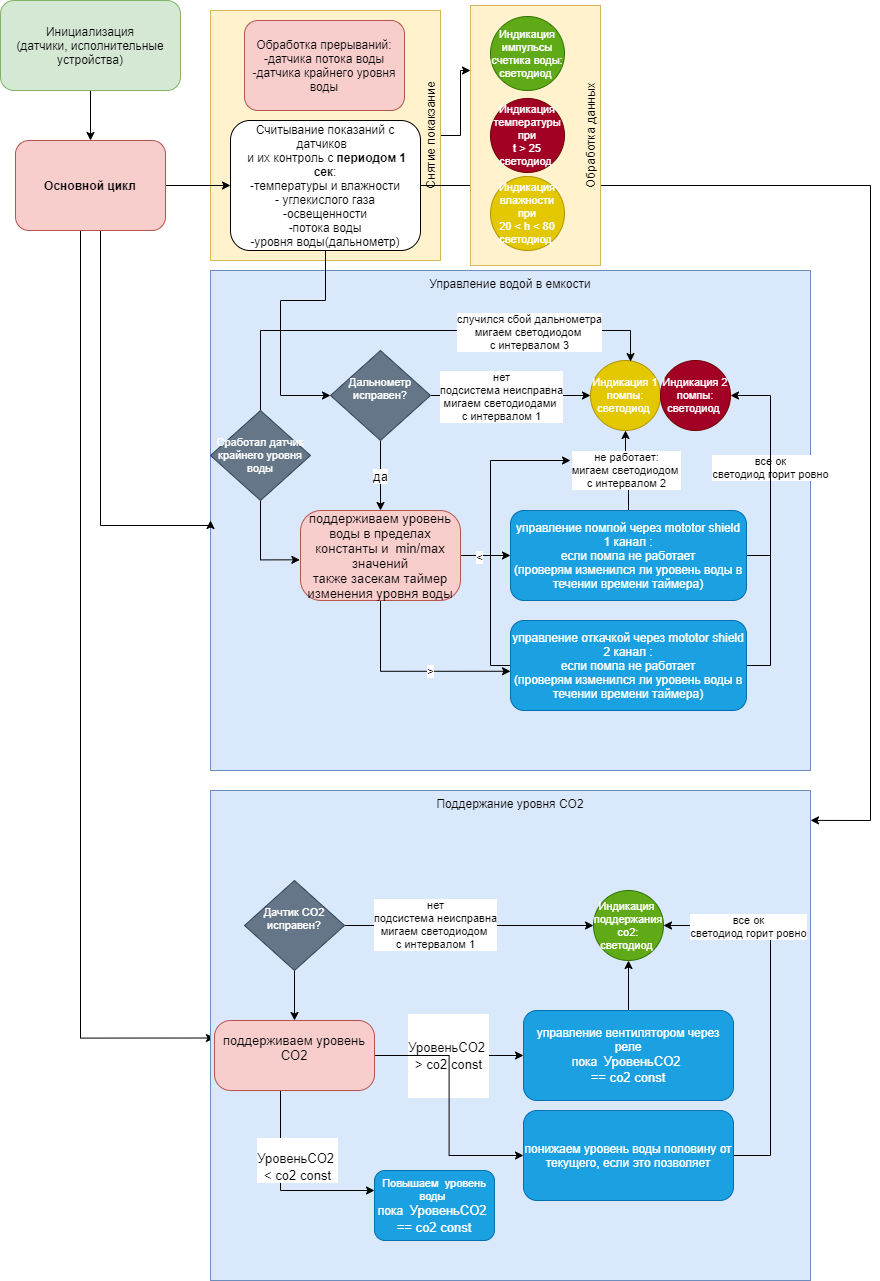
Описание устройства:Устройство предназначено для поддержания климата в ограниченной среде, включающая себя систему мониторинга и формирования микроклимата в ограниченной области пространства , являющегося прототипом системы жизнеобеспечения удаленной, автономной, обитаемой станции — космического корабля, лунной базовой станции или подводного аппарата. Описание работы: Задается начальный уровень воды в боксе - половина от макс.объема воды также константа уровня CO2 Основной цикл содержит 3 подпрограммы: -снятие показаний данных с датчиков и их контроль с периодом 1 сек. -поддержка уровня воды в боксе -поддержка уровня СО2 в боксе Акцент был сделан безопасность работы и отказоустойчивость устройства что очень важно в В случае неисправности датчиков/насосов, алгоритм анализирует обратную связь, с изменением определенного параметра, если он не менятся в течении времени, система видит ошибку и прерывает работу алгоритма. Датчик уровня воды (угловой) AMP-X22 - установлен на предельном уровне воды, если дальномер откажет то вода не поднимется выше предела по запасной логике. Основной алгоритм же просто поддерживает работу по простой логике больше/меньше и вкл/выкл вентилятор/насос Принципиальная схема:
Алгоритм работы:
|
|||
Базовая схема устройства контроля микроклимата
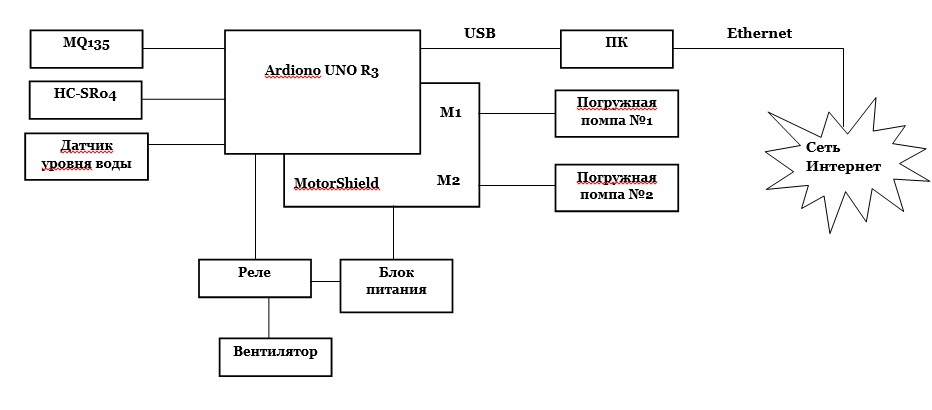
Таблица межблочных электрических соединений
| Элемент | Контакт | Контакт | Элемент |
|
Датчик углекислого газа MQ-135 (Troyka-модуль) Артикул AMP-B094 |
S |
5V |
Arduino UNO R3 |
|
V |
A0 |
||
|
G |
GND |
||
|
E |
09 |
||
|
Ультразвуковой дальномер HC-SR04 Артикул AMP-X142-U2 |
GND |
GND |
|
|
Echo |
11 |
||
|
Trig |
10 |
||
|
VCC |
08 |
||
|
Датчик уровня воды (угловой) Артикул AMP-X221 |
* |
GND |
|
|
* |
12 |
||
|
Motor Shield (2 канала, 2 А) Артикул AMP-B001 |
H2 |
07 |
|
|
E2 |
06 |
||
|
E1 |
05 |
||
|
H1 |
04 |
||
|
M1 + |
Красный провод |
Погружная помпа с трубкой Артикул AMP-X157 №1 |
|
|
M1 - |
Черный провод |
||
|
M2 + |
Красный провод |
Погружная помпа с трубкой Артикул AMP-X157 №2 |
|
|
M2 - |
Черный провод |
||
|
+ |
-V |
Встраиваемый блок питания (12 В, 2100 мА) Артикул AMP-X285 |
|
|
- |
+V |
||
|
Реле (Troyka-модуль) Артикул AMP-B010 |
S |
A5 |
Arduino UNO R3 |
|
V |
3,3V |
||
|
G |
-V |
Встраиваемый блок питания (12 В, 2100 мА) Артикул AMP-X285 |
|
|
NO |
|||
|
COM |
Черный провод |
Вентилятор Evercool EC2510H12B (12В, 25х25х10мм) |
|
|
Встраиваемый блок питания (12 В, 2100 мА) Артикул AMP-X285 |
+V |
Красный провод |
Примечания:
1. У датчика углекислого газа MQ-135 (Troyka-модуль) Артикул AMP-B094 перемычка «H=V» установлена
2. У Motor Shield (2 канала, 2 А) Артикул AMP-B001 перемычка «PWR JOINT» установлена
3. Погружная помпа с трубкой Артикул AMP-X157 №1 – установлена в "жилом боксе".
4. Погружная помпа с трубкой Артикул AMP-X157 №2 – установлена в боксе с газированной водой
1. Закачивает в "жилой бокс" слабогазированную воду до максимальной отметки, фиксируемой датчиком уровня воды.
2. Измеряет уровень СО2 (измеряется в ppm) в момент достижения максимальной отметки и через 10 сек. Принимает среднее значение этих двух измерения за ОПТИМАЛЬНЫЙ уровень СО2.
3. С помощью вентилятора, выкачивающего воздух, и погружных насосов, удерживает уровень СО2 в "жилом боксе" в течение 5 минут на ОПТИМАЛЬНОМ уровне +/- 20 ppm.
В случае если во время удаленного тестирования или финального испытания уровень воды в "жилом боксе" поднялся до красной отметки, расположенной выше датчика уровня воды, устройство выключается в организаторами в ручном, аварийном порядке.